
OpenSees has its fair share of element implementations that are computationally inefficient. Fortunately, most of those elements are never used.
But among elements that are used, SFI-MVLEM is the undisputed champion.
Whereas the standard MVLEM element uses a uniaxial material in each fiber, the SFI-MVLEM element accounts for the interaction of axial and shear stress (


To enforce
But letting the global solution zero out fiber stresses is like throwing your garbage out on the street then admiring your clean home.
And, like throwing your garbage out on the street, those additional nodes cause huge global problems.
Consider the minimal shear wall example from a previous post. A 3D model is shown, but the issues apply to 2D models as well.
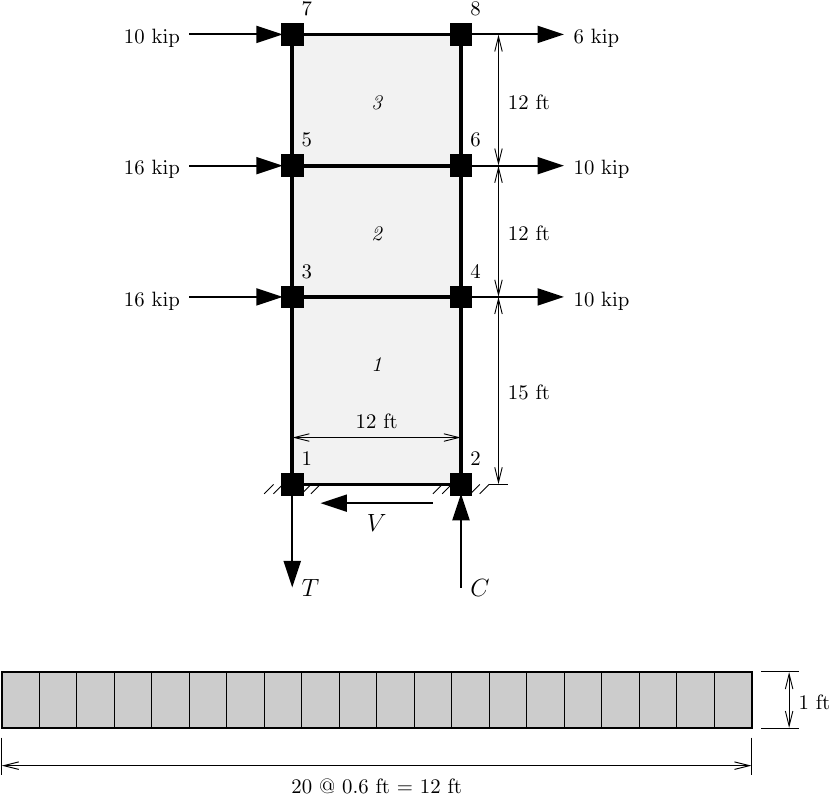
The definition of nodes and loads is identical to the previous post; the only difference is the material and element definition. Here an elastic-isotropic material is used, so the analysis should be simple.
N = 20 # Fibers
Ec = 3600*ksi
nu = 0.25
b = 1*ft
h = 12*ft
ops.nDMaterial('ElasticIsotropic',1,Ec,nu)
conc = [1]*N
bList = [b]*N
hList = [h/N]*N
ops.element('SFI_MVLEM',1,1,2,4,3,N,0.4,'-thick',*bList,'-width',*hList,'-mat',*conc,'-Eave',Ec)
ops.element('SFI_MVLEM',2,3,4,6,5,N,0.4,'-thick',*bList,'-width',*hList,'-mat',*conc,'-Eave',Ec)
ops.element('SFI_MVLEM',3,5,6,8,7,N,0.4,'-thick',*bList,'-width',*hList,'-mat',*conc,'-Eave',Ec)
Four obvious problems with the SFI-MVLEM element implementation are described below. But I didn’t write this post to point out problems and not offer solutions–that would be complaining, not writing–so, a mitigation strategy is offered for each issue.
1. Inconsistent Tangent
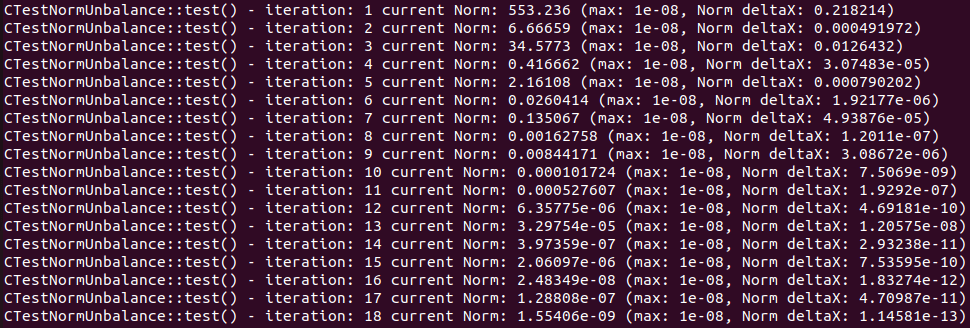
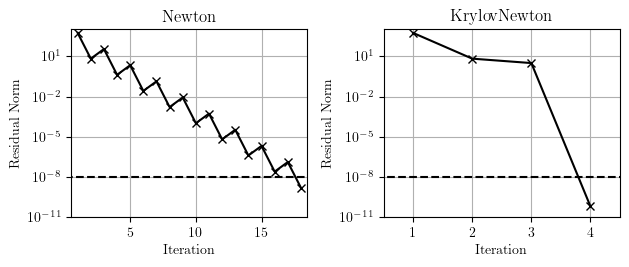
The first thing you will notice when running the minimal wall example with SFI-MVLEM elements is the excessive number of iterations. Remember, the wall constitutive model is linear-elastic, so equilibrium should be found in one iteration. But the analysis takes 18 iterations with the Newton-Raphson algorithm.
The slow convergence for linear response indicates an inconsistent tangent coming from the element. I haven’t confirmed the source of the inconsistent tangent, but I suspect the separation of the 22 from the 11 and 12 terms in the fiber tangent is not handled properly. There needs to be some static condensation, akin to what happens in the BeamFiber2dPS wrapper class, but I don’t see that happening in the SFI-MVLEM source code. Making matters worse, it appears the SFI-MVLEM ignores the tangent terms that couple axial and shear stresses in each fiber.
Mitigation
The Krylov-Newton algorithm can be effective at dealing with sloppy tangents. For this minimal wall example, the Krylov-Newton algorithm requires only four iterations.
OK, this issue has nothing to do with the additional internal nodes. But, as shown in the next two issues, those additional nodes make for more equations, and more equations translates to longer solve times. So, if you have to sit through more iterations because of an inconsistent tangent, you will notice longer run times, particularly for large models.
2. System Size
Using standard MVLEM elements for this simple wall model, the system size is 42 equations, but with the SFI-MVLEM elements, the system size is 102 equations. The resulting topologies of the stiffness matrix are shown below (using Plain numberer).
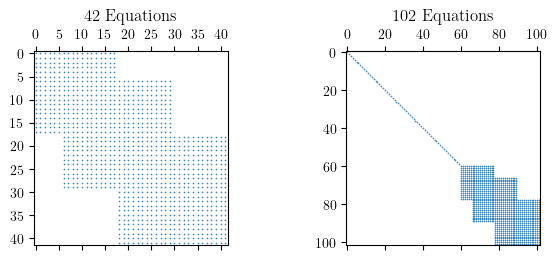
Both matrices have the same bandwidth (about 25), but due to the additional equations, the SFI-MVLEM model will have longer solve times, especially if you use a solver that assumes banded matrix storage or, even worse, full matrix storage. And the number of equations and solve time only go up if you increase the number of fibers in each SFI-MVLEM element.
Mitigation
If you must use SFI-MVLEM elements, use as few fibers as possible.
3. Equation Numbering
Compounding the longer solve times, the default equation numberer, RCM, and the lesser used AMD, can produce larger matrix bandwidths than the Plain numberer. The equation numbering algorithms deal with the extra SFI-MVLEM nodes in their own ways.
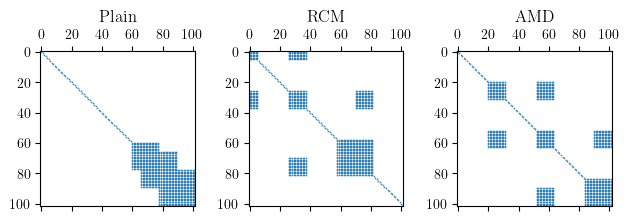
This may be the only case where using RCM is significantly worse than the Plain numberer. But for larger models, you’ll probably be better off sticking wtih RCM for the equation numbering.
Mitigation
Use a linear equation solver with sparse matrix storage, e.g., UmfPack, SparseGeneral, or Mumps. With sparse matrix storage, the topology of the stiffness matrix and the equation numbering don’t matter much, only the number of non-zero matrix entries.
4. Internal Node Tags
Although the model has eight user-defined nodes, if you print out the list of node tags (using ops.getNodeTags()), you will see there are 68 nodes defined in the domain–the eight nodes plus 60 nodes, one for each of the 20 fibers in each of the three elements.

For each element, the internal node tags range from -(1000*eleTag+1) to -(1000*eleTag+Nfibers), e.g., element 2 creates nodes with tags -2001 to -2020.
Mitigation
There’s no getting around this implementation decision. Avoid defining nodes with negative tags–something that OpenSees allows. Similarly, don’t define SFI-MVLEM elements with negative tags as this could lead to collisions with positive node tags defined elsewhere in your model.
Conclusions
Using the default analysis options in OpenSees, you can experience unnecessarily long run-times in the analysis of SFI-MVLEM models. If you have to stick with the SFI-MVLEM elements, remember the following:
- Use as few fibers as possible
- Use a sparse matrix solver like UmfPack or Mumps
- Use the Krylov-Newton algorithm
- Be careful using negative node tags elsewhere in your model
If you have some latitude, take a small step over to the E-SFI-MVLEM element, which is the cura te ipsum for SFI-MVLEM. The element imposes an empirically derived shape function on the 

Dr. Scott,
Thank you very much for this informative article.
I have a question regarding this post. Can you elaborate on (or give a reference to) what causes an inconsistent tangent for an element?
Best regards,
Zakariya
LikeLike
Also, the other issue with current SFI-MVLEM is that applying vertical ground motion casues Opensees crash because the pattern want to assign acceleration to vertical DOF of the internal nodes.
LikeLiked by 1 person
Yeah, thanks for the reminder on the vertical ground acceleration. That should only give an error now instead of causing OpenSees to quit. But either way, still not able to apply vertical ground motions to the SFI_MVLEM element.
LikeLiked by 1 person
The standard reference is here: https://sci.bban.top/pdf/10.1016/0045-7825%252885%252990070-2.pdf
But an inconsistent tangent can be caused by many things:
– error in the formulation
– error in the implementation
– knowingly not implementing the correct tangent (sometimes can be difficult)
LikeLiked by 1 person
This is great. Thank you very much Dr. Scott.
BTW, can the convergence issue be related to the fact that this element has constant curvature over its length and essentially one Gauss point?
LikeLike
Dear Dr. Scott,
Having been inspired by this fascinating article, I have looked into the formulations of SFI-MVLEM. It appears that the inconsistent tangent stems from the fact that even though two neighbour fibres i and i+1 have different shear strains and consequently different shear stresses, the element formulations are only interested in σ_yx. However, it should also consider the fact that σ_yx should be equal to σ_xy for each element. Therefore, the vertical equilibrium for internal nodes may not be maintained as σ_xy^i+σ_xy^(i+1) is not necessarily zero for each internal node considering the effect of shear deformation.
Zakariya
LikeLike
Thanks for such insightful post. I’m curious about the remaining issues that you mention Prof. Scott. Indeed the E-SFI is a big step forward compared to the vanilla SFI, yet it is still significantly more computationally expensive than the MVLEM. In our testing for a 16 story building, some ground motions can take up to more than 20 times to run.
My intuition points me to the ConcreteCM material as the suspect here, as one interesting thing I’ve noted is that in the ESFI documentation of one of its developers (available here: https://github.com/carloslopezolea/E-SFI/blob/main/examples/Example_1/Model.tcl) uses an OpenSees fork that runs using the trusted Concrete02 instead of the ConcreteCM.
LikeLike
Yeah, I’m not surprised. The implementation of the FSAM material is awkward and inextensible at best.
LikeLike